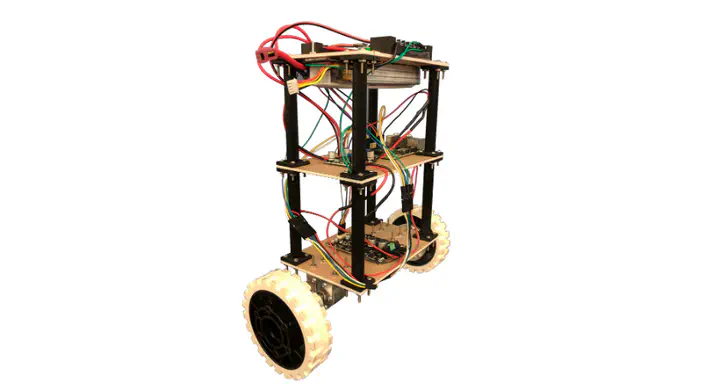
Neuromorphic self-balancing robot
DANNA 2 (Dynamic Adaptive Neural Network Array) is a brain inspired computing model developed by the TENNLab at the University of Tennessee, Knoxville. It is the successor the original DANNA, a neuromorphic hardware implementation [1]. The model follows a spiking neural network model using neuromorphic elements of neurons and synapses [2]. The models are trained using evolutionary optimization (EO). A population of random networks are evaluated using a designed fitness function. Each iteration, the networks with the highest fitness are combined and mutated to create a new population [2].